Robotik
Zwei Welten begegnen sich
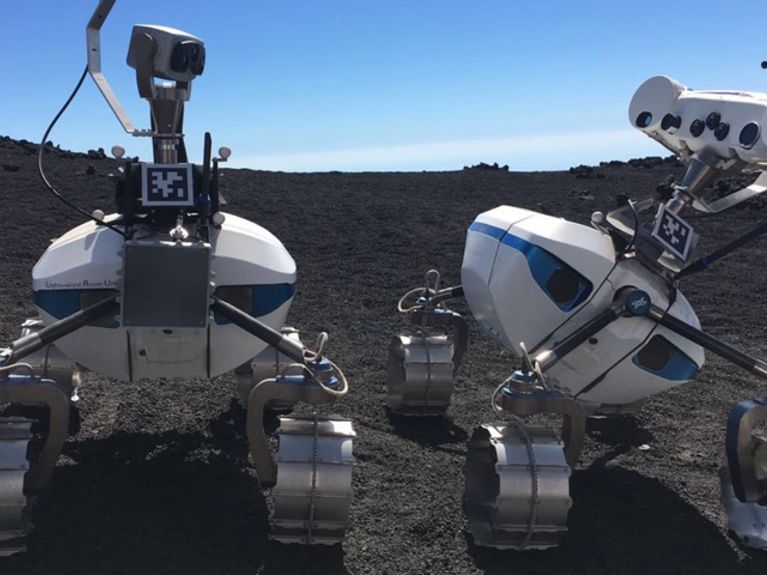
Bild: DLR (CC-BY 3.0)
Autonome Forschungsroboter spielen ebenso in der Tiefseeforschung wie bei der Erkundung ferner Planeten eine entscheidende Rolle. Helmholtz-Forscher aus beiden Bereichen haben sich zusammengetan und entwickeln gemeinsam neue Techniken. Die Suche nach Testgebieten führte sie jetzt auf den Ätna.
Tiefseeforschung und Raumfahrt haben auf den ersten Blick nicht so viel miteinander zu tun. Technisch gesehen sind die Wissenschaftler jedoch in beiden Bereichen auf roboterartige Werkzeuge angewiesen, die unter extremen Bedingungen autonom funktionieren. Vor fünf Jahren startete die Helmholtz Allianz Robotische Exploration unter Extrembedingungen (ROBEX). Erstmals kooperierten dabei Wissenschaftler und Ingenieure aus den Bereichen Tiefsee und Raumfahrt miteinander.
Im Laufe der Zusammenarbeit wurde das Bewusstsein für die Schnittmenge der Herausforderungen immer größer. "In der Tiefsee dreht sich zwar vieles um Dunkelheit und das Element Wasser, während in der Raumfahrt die Schwerelosigkeit und die Strahlung Thema sind", erklärt Martina Wilde vom Alfred-Wegener-Institut Helmholtz-Zentrum für Polar- und Meeresforschung (AWI), die das Projekt wissenschaftlich koordiniert. "Gemeinsam stellen sich aber Forscher in beiden Regionen Fragen zu Navigation, Energieversorgung und Datenaustausch." Das Ziel lautet, die Erforschung schwer erreichbarer Gebiete mit extremen Umweltbedingungen zu ermöglichen: Tiefsee, Polargebiete, unseren Erdmond, aber auch andere Himmelskörper.
DLR-Forscher mit dem autonom arbeitenden Rover auf dem Ätna. Bild: DLR (CC-BY 3.0)
Einen geeigneten Ort, an dem die Forscher ihre Roboter testen können, fanden sie auf dem Ätna. Die unwirtliche Landschaft in 2.600 Meter Höhe nutzte ein fast 50-köpfiges Team vom 12. Juni bis zum 7. Juli 2017 als Bühne für eine Generalprobe. Insgesamt 120 Forscher aus 16 Institutionen haben sich hier zusammengetan, unter der Koordination des AWI sowie des Deutschen-Zentrums für Luft- und Raumfahrt (DLR). "Nachdem wir weltweit intensiv gesucht hatten, fiel unsere Wahl auf den Ätna, weil wir dort viele Bedingungen vorfinden, die dem Mond ähnlich sind", erläutert DLR-Ingenieur Armin Wedler vom Robotik und Mechatronik-Zentrum.
Das Team hat einen Lander, einen Rover und Sensorboxen getestet. Wie bei einer künftig denkbaren unbemannten Mondmission mussten die Komponenten ihre Aufgaben völlig autonom erfüllen. "Dabei waren zum einen die mondähnlichen Bodenverhältnisse interessant", sagt Wedler. "Entscheidend war für uns zudem die Seismik." Tief unter dem Vulkan, an den tektonischen Grenzen, kommt es immer wieder zu kleinen Beben. Die sollten gemessen werden, weil auch auf dem Mond mit seismischen Messungen viele offene Fragen beantwortet werden sollen. Denn auch dort knirscht es unter der Oberfläche - ausgelöst durch Gravitationskräfte, die auch die Ursache für Ebbe und Flut der irdischen Ozeane sind.
Bei der künftigen Suche nach einem passenden Standort für eine dauerhafte Mondstation ist das Wissen über die Verhältnisse unter der Oberfläche sehr wichtig für die Wahl des Ortes. Auf dem Ätna zumindest haben die autonomen Roboter ihre Tests bestanden, also korrekt gemessen."Die Mission haben wir unter Bedingungen vollzogen, die absolut real waren", betont die Physikerin Martina Wilde vom AWI, die ROBEX wissenschaftlich koordiniert. "Dabei kamen wir zu Lösungen, die nicht nur auf dem Mond, sondern auch in der Tiefsee greifen." So musste der Rover zum Beispiel selbstständig wieder zum Lander zurückfinden - und zwar ohne Steuerung per Fernbedienung oder GPS-Unterstützung.
Die Wissenschaftler hatten ihr Kontrollzentrum in einem 30 Kilometer entfernten Hotelzimmer eingerichtet. Ihre Kommunikation zum Ätna beschränkte sich auf WLAN (Pendants in der Tiefsee sind akustische Methoden). Um die Dockingstation ansteuern zu können, musste der Rover eine Bilderkennung nutzen, die auch unter erschwerten Bedingungen noch funktioniert. Die Forscher arbeiteten mit sogenannten April-Tags. Das sind binäre Muster, die an Zielpunkten angebracht werden und von autonomen Robotern eindeutig identifiziert werden können.
Als die Zusammenarbeit im Rahmen der Helmholtz-Allianz ROBEX begann, haben sich die beiden Wissenschaftlergemeinden zunächst im Rahmen verschiedener Workshops kennen gelernt, ihre jeweiligen Herausforderungen dargelegt und sich auf ein gemeinsames Lösungskonzept für beide Forschungsumgebungen geeinigt. Das Ziel, die Kombination eines stationären Systems mit einem oder mehreren mobilen Elementen zu entwickeln und zu bauen, ist so gut wie erreicht. Bevor ROBEX im September endet, wird nach der Ätna-Kampagne der Raumfahrer noch eine Mission der Tiefseeforscher starten. Am 22. August wird das Team vom Forschungsschiff "Polarstern" aus in der Arktis vor Spitzbergen mehrere robotische Systeme testen.
"Es hat weltweit noch kein so komplexes Szenario gegeben", sagt Wilde. Und weil die Zusammenarbeit so erfolgreich war, haben die Wissenschaftler auch schon ein Folgeprojekt im Visier. Im nächsten Schritt möchten sie ihre Geräte noch besser vernetzen: Wenn Glider, Crawler und autonome U-Boote im Verband neue Welten entdecken, sollen sie sich austauschen, um gemeinsam Informationen zu sammeln und Aufgaben zu lösen. So, wie es die Tiefsee- und Raumfahrtforscher auch tun.
Mission ROBEX unter Mondbedingungen auf dem Ätna durchgeführt
Mondforschung - Neue Perspektiven (Heute Journal vom 24.7. 2017)




Leser:innenkommentare